

Persiana controlada con botones
 Cualquier placa con conexiones digitales para servos (micro:bit, micro:STEAMMakers y otras). Para la simulación de la persiana se usará la pantalla TFT (Citilab ED1, M5Stack‑Core y otras).
Cualquier placa con conexiones digitales para servos (micro:bit, micro:STEAMMakers y otras). Para la simulación de la persiana se usará la pantalla TFT (Citilab ED1, M5Stack‑Core y otras).
Motores de corriente continua
Los motores son actuadores que transforman energía eléctrica en energía mecánica de rotación.
Los motores de corriente continua utilizan corriente eléctrica continua para su funcionamiento. Estos motores también se conocen como motores CC, de corriente continua; en inglés, direct current, por eso motores DC.
Los motores que emplean corriente alterna, en castellano, se llaman motores de CA y en inglés motores AC, de alternating current.


Servomotores
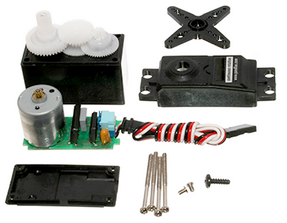
Un servomotor es un motor de corriente continua (DC) cuyo comportamiento puede controlarse gracias a una pequeña placa electrónica y un conjunto de engranajes.
Aunque existen distintos tipos de servomotores, la forma de controlarlos es la misma: mediante un pulso eléctrico con una duración determinada.
Dependiendo de la duración de este pulso, el servomotor girará hasta un ángulo concreto (estándar) o girará continuamente hacia un lado u otro (rotación continua).

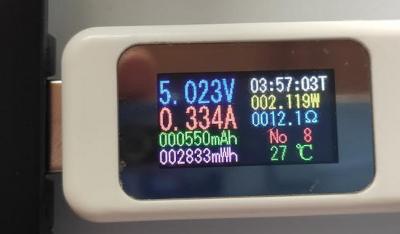
Estos servomotores consumen unos 100‑200 mA y pueden llegar a 500 mA en el momento de arranque o cambio de sentido.
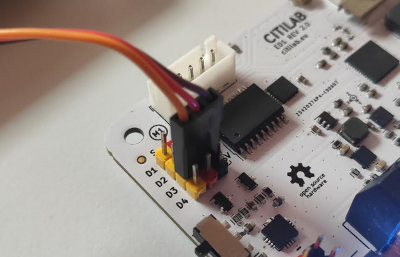
Los servomotores se pueden conectar a cualquiera de las salidas digitales, aunque D1 y D2 suministran 3,3 V (por lo que el servomotor funciona con menos fuerza), mientras que D3 y D4 funcionan a 5 V. La salida D4 está conectada internamente al altavoz y pueden producirse pequeños ruidos.
¡Importante! Si usas las salidas 3 y 4 en una ED1 anterior a la versión 2.3, se recomienda hacerlo con batería y con el interruptor en “ON”.
Servomotores de ángulo
Los servomotores estándar o de ángulo se mueven un ángulo concreto entre dos valores. El modelo más típico es el SG90, que se mueve entre 0 y 180 grados, tardando unos 150 ms en recorrer ese ángulo. ¡Este motor no da vueltas completas!
Viene acompañado de una serie de complementos que permiten conectarlo con engranajes o acoplarlo a otros elementos.
Los servomotores de ángulo que utilizaremos son los SG90, un modelo pequeño y muy económico.

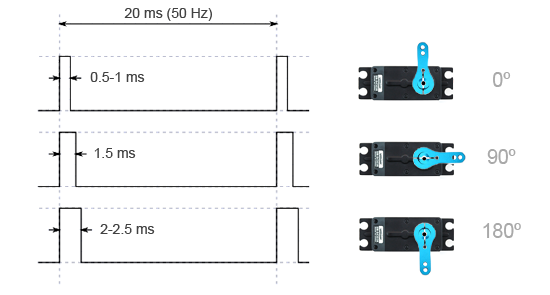
Control del ángulo por ancho de pulso
Para fijar el ángulo se envía un pulso cada 20 ms. Según la duración del pulso, el servo cambia el ángulo. Se trata de una modulación por ancho de pulso (PWM en inglés).
Si la duración es aproximadamente 1 ms, el servo se coloca en un ángulo de 0 º y si es de 2 ms, a 180 º.
Una vez fijado el ángulo, el servomotor no se mueve aunque sigamos enviando pulsos.
Reto 1: crea un programa que haga que el servo se mueva de un ángulo a otro, alternativamente
Pista: hay que utilizar el bloque avanzado
espera _ microsegundosde la categoria Control.
Solución al reto 1

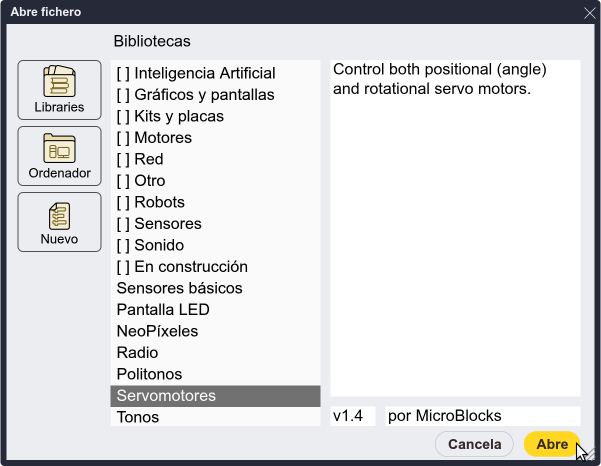
Biblioteca de servos
- Para trabajar con servomotores es más práctico usar la biblioteca Servomotors.
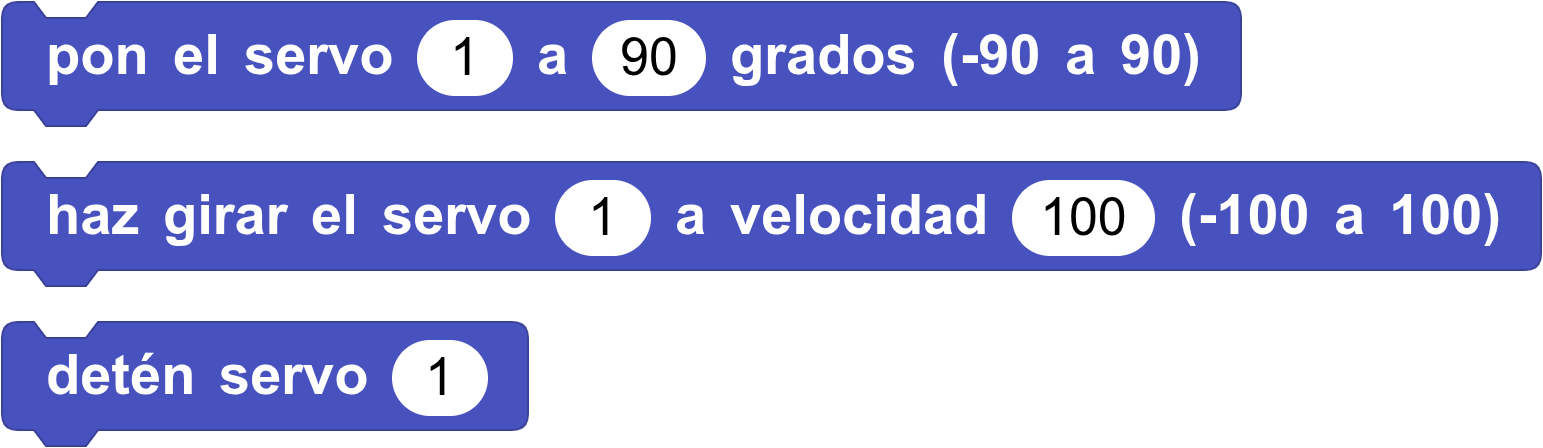
- El bloque
pon el servo _ a _ grados (-90 a 90)se utiliza con motores de ángulo; en cambio,haz girar el servo _ a velocidad _ (-100 a 100)se emplea con motores de rotación continua.
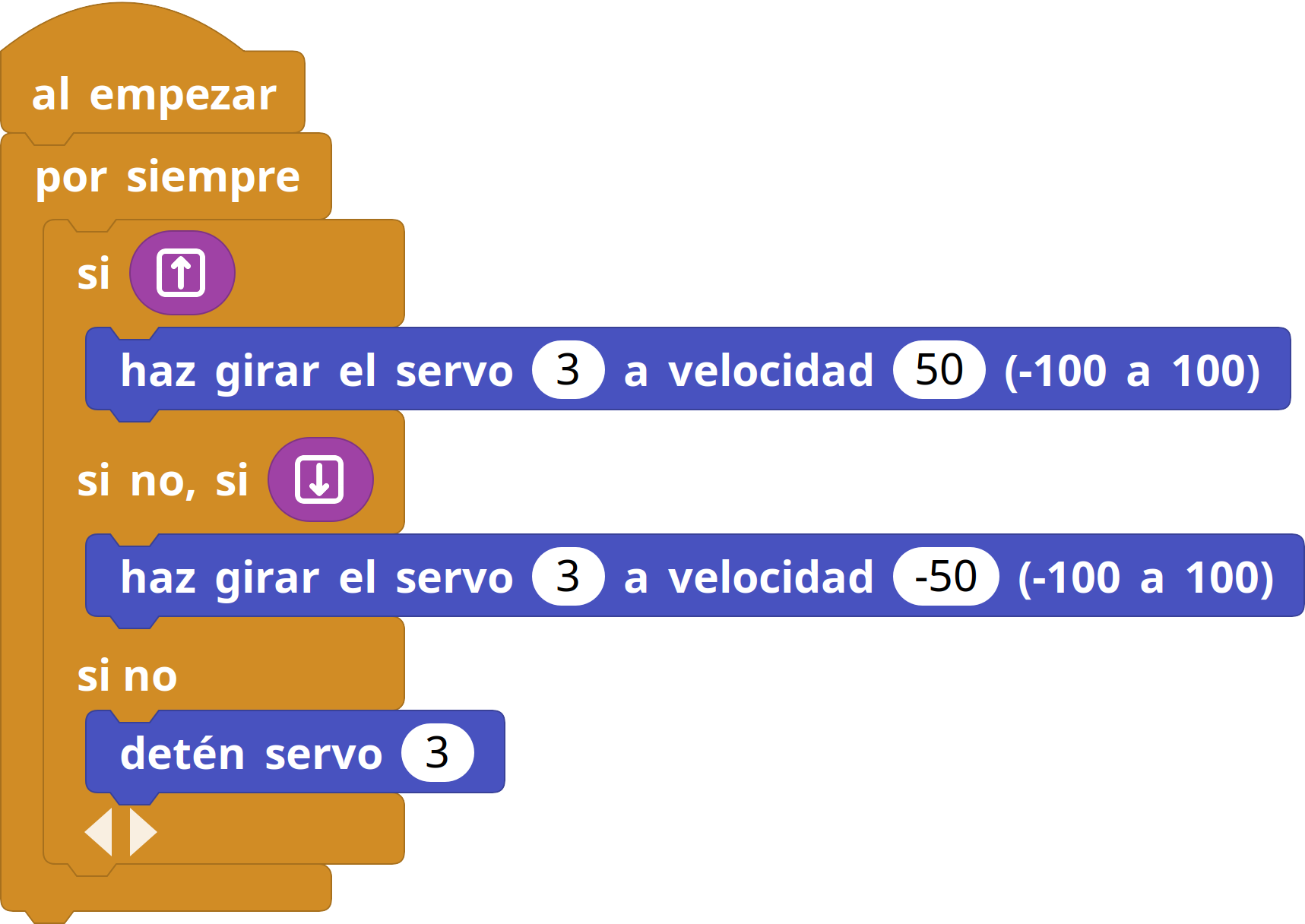
Reto 2: controla un motor de rotación continua con el botón arriba y abajo
Solución al reto 2
Domótica
Es la aplicación de distintas tecnologías a la mejora de la vivienda, especialmente para aumentar la eficiencia energética.
También se puede aplicar a la mejora de escuelas, edificios públicos o incluso ciudades.
Como ejemplo, haremos una persiana que se controle con el nivel de luz y un sistema de iluminación que se active dando palmadas.

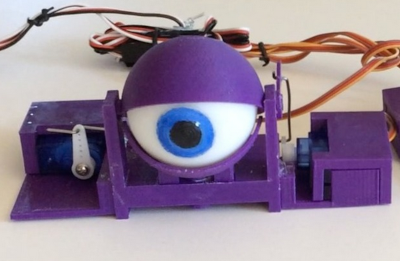
Simulación de una persiana
Utilizaremos un sencillo dibujo en la pantalla para simular una persiana cuya altura variará según el valor de la variable y.
En un caso real deberíamos usar finales de carrera que indiquen que la persiana ha llegado a los límites superior e inferior. Aquí este control lo haremos por software mediante el valor de la variable (0 = superior, 127 = inferior).
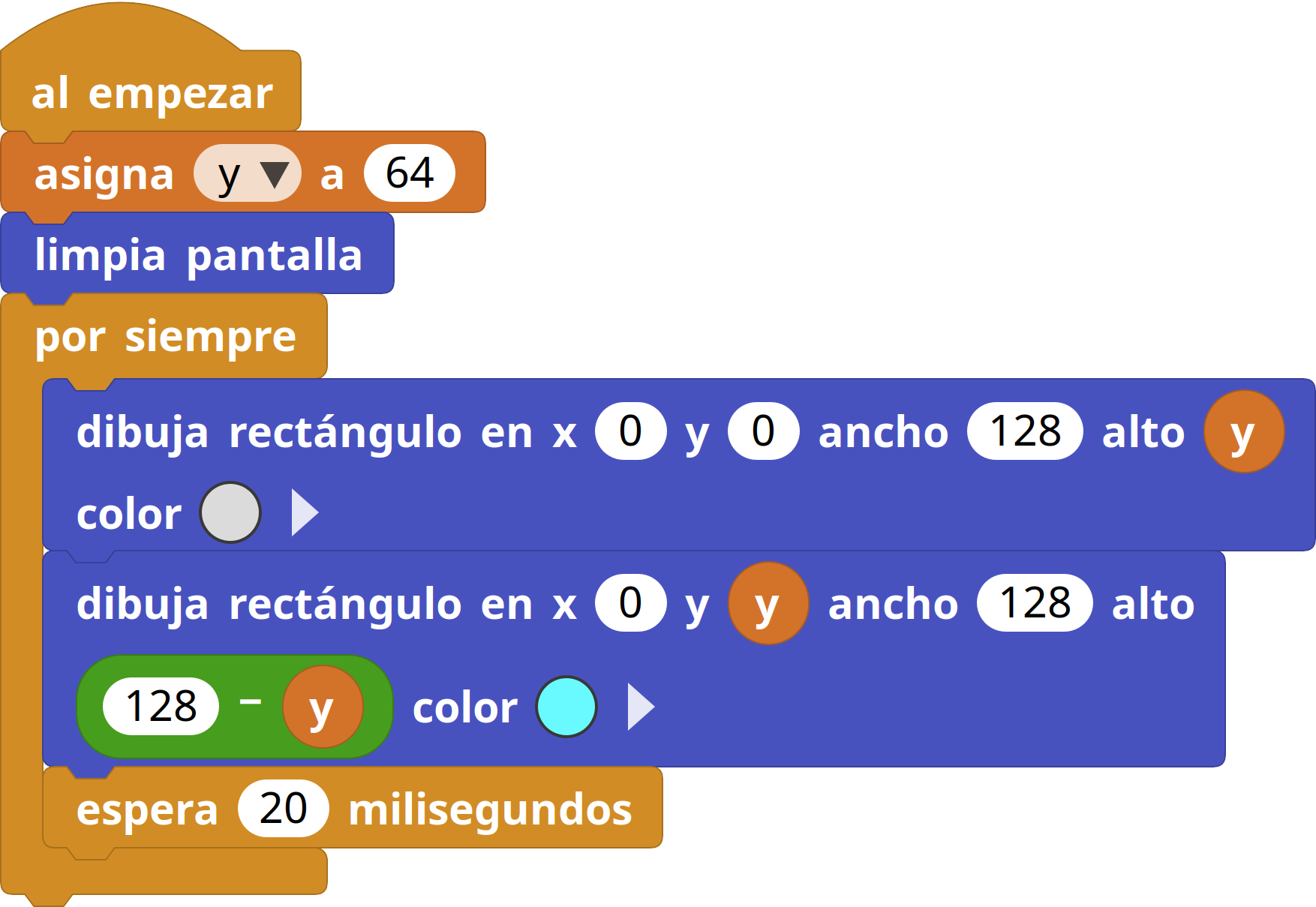
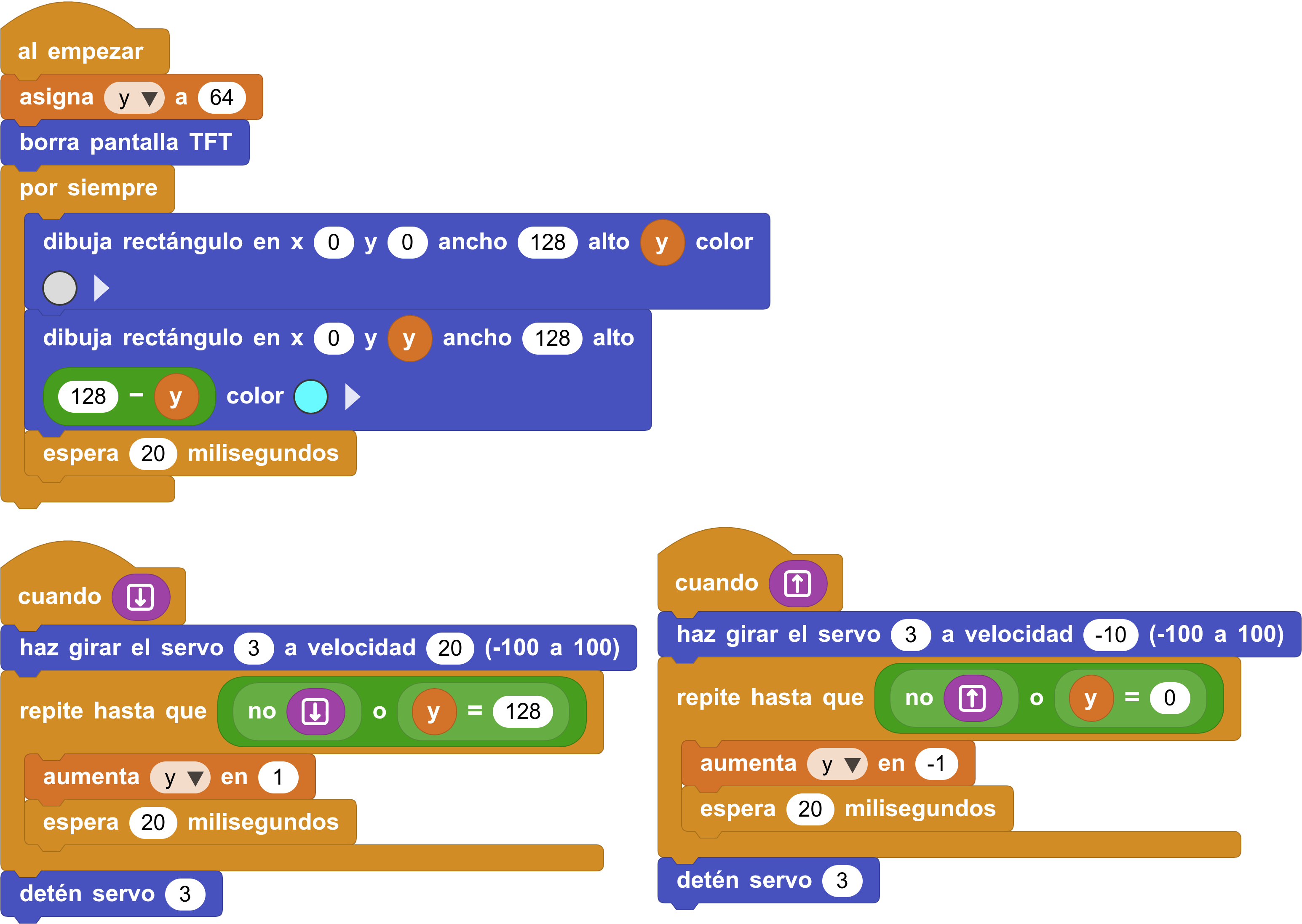
Reto 3: simula una persiana (con la pantalla y el servomotor) controlada por los botones arriba y abajo
Solución al reto 3
| ⬅️ Actividad anterior | Actividad siguiente ➡️ |
|---|
© by Citilab Edutec 2019-2025.
This work is licensed under a CC-BY-SA 4.0 license.