

Persiana controlada amb botons
 Qualsevol placa amb connexions digitals pels servos (micro:bit, micro:STEAMMakers i d'altres). Per a la simulació de la persiana es farà servir la pantalla TFT (Citilab ED1, M5Stack-Core i d'altres).
Qualsevol placa amb connexions digitals pels servos (micro:bit, micro:STEAMMakers i d'altres). Per a la simulació de la persiana es farà servir la pantalla TFT (Citilab ED1, M5Stack-Core i d'altres).
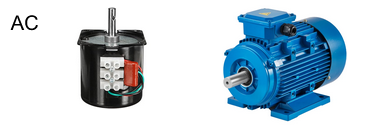
Motors de corrent continu
Els motors són actuadors que transformen energia elèctrica en energia mecànica de rotació.
Els motors de corrent continu fan servir corrent elèctric continu pel seu funcionament. Aquests motors també són coneguts per motors CC, de corrent continu, que en anglès és direct current, per això motors DC.
Els motors que fan servir corrent altern, en català, es diuen motors de CA i en anglès motors AC, de l'anglès alternating current.

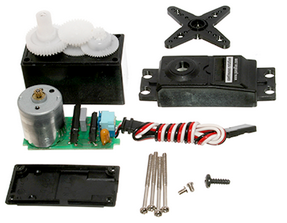
Servomotors
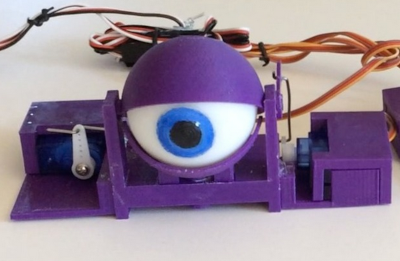
Un servomotor és un motor de corrent continu (DC) al que, gràcies a una petita placa electrònica i un conjunt d’engranatges, es pot controlar el seu comportament.
Encara que hi ha diferents tipus de servomotors la manera de controlar-los es la mateixa: mitjançant un pols elèctric amb una durada determinada.
Depenent de la duració d’aquest pols el servomotor girarà cap a un angle determinat (estàndard) o girarà contínuament cap a un costat o cap a un altre (rotació contínua).

Aquests servomotors consumeixen uns 100-200 mA i poden arribar als 500mA en el moment de posada en marxa o canvi de sentit.
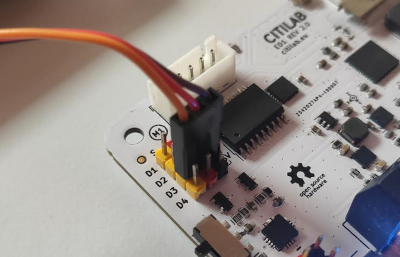
Els servomotors es poden connectar a qualsevol de les sortides digitals, tot i que D1 i D2 donen 3,3V, per tant el servomotor funciona amb menys força, mentre que D3 i D4 funcionen a 5V. La sortida D4 està connectada internament a l’altaveu i es poden produir petits sorolls.
Important! En cas de fer servir les sortides 3 i 4 en una ED1 anterior a la versió 2.3 es recomana fer-ho amb bateria i amb l'interruptor en "ON".
Servomotors d'angle
Els servomotors estàndard o d’angle es mouen un angle concret entre 2 valors. El model més típic és el SG90 que es mou entre 0 i 180 graus, trigant uns 150ms a fer aquest angle. Aquest motor no dona voltes!.
Ve acompanyat amb una sèrie de complements que permeten connectar amb engranatges o acoblar a d’altres elements.
Els servomotors d’angle que farem servir són els SG90, un model petit i molt assequible econòmicament.

Control de l'angle per ample de pols
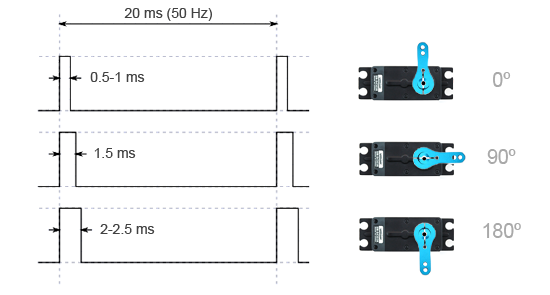
Per establir l’angle s’envia un pols cada 20 ms. Segons la durada del pols el servo canvia l’angle. Es tracta d’una modulació per amplada de pols (PWM en anglès).
Si la durada és aproximadament 1 ms el servo es col·loca en un angle 0º i si és 2 ms a 180º.
Una vegada establert l’angle, el servomotor no es mou encara que enviem més polsos.
Repte 1: fes un programa que faci que el servo es mogui d’un angle a un altre, alternativament
Pista: cal utilitzar el bloc avançat
espera _ microsegonsde la categoria Control.
Solució al repte 1

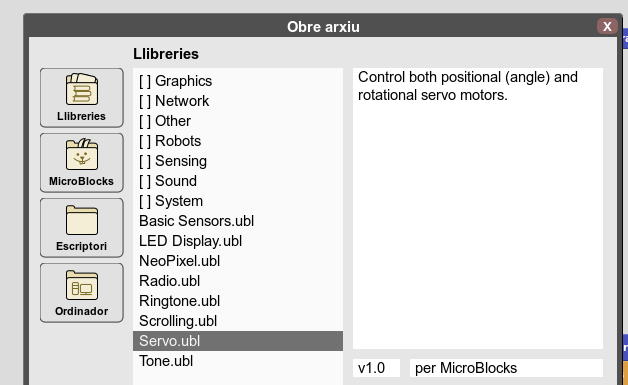
Biblioteca servos
- Per treballar amb servomotors és més pràctic fer servir la biblioteca Servomotors.
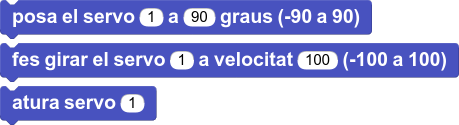
- El bloc
posa el servo _ a _ graus (-90 a 90)es fa servir amb els motors d’angle, en canvi, el defes girar el servo _ a velocitat _ (-100 a 100)s'utilitza amb els motors de rotació contínua.
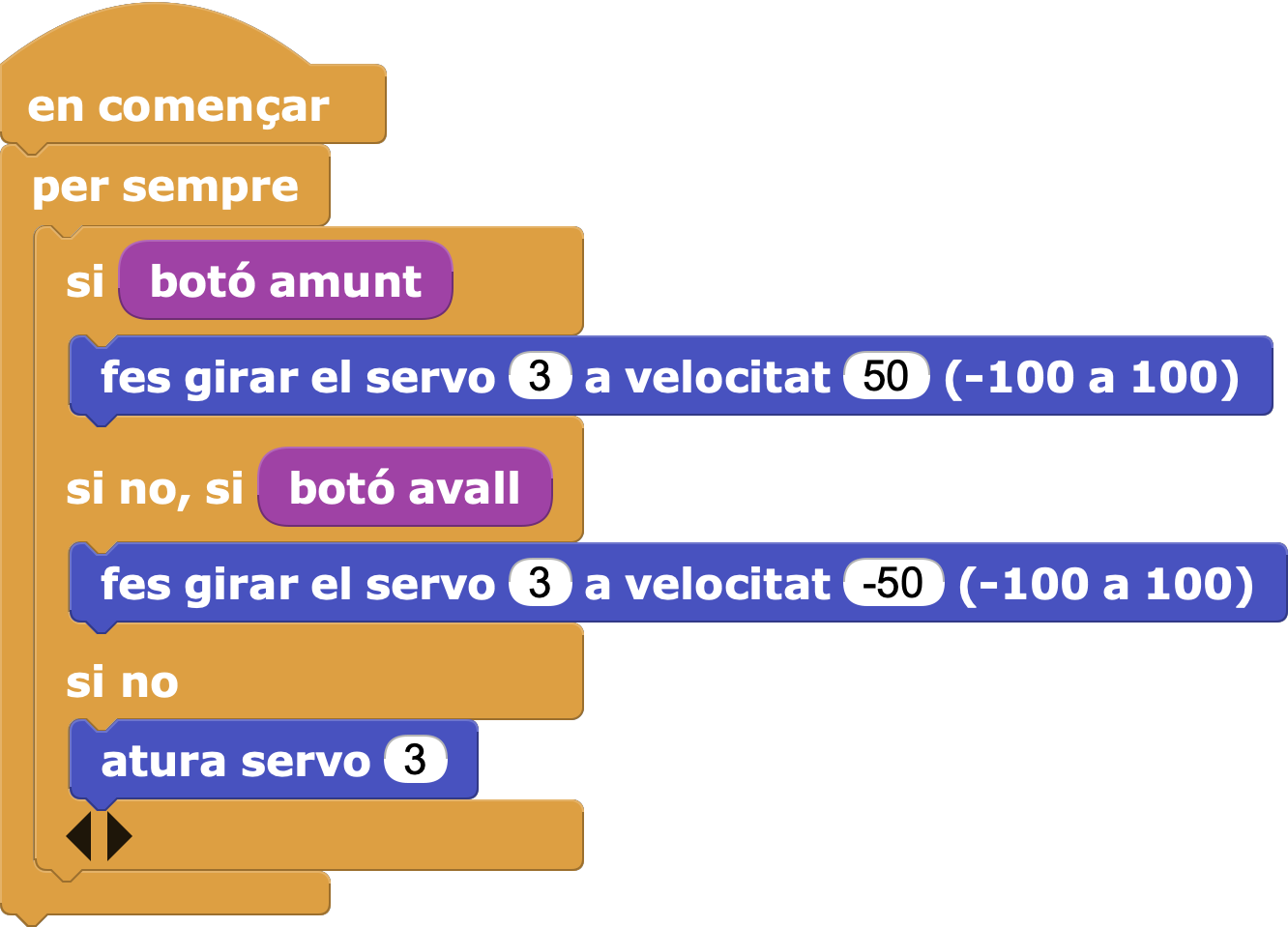
Repte 2: controla un motor de rotació continua amb el botó amunt i avall
Solució al repte 2
Domòtica
És l'aplicació de diferents tecnologies a la millora de l'habitatge, especialment per la millora de l'eficiència energètica.
També es pot aplicar a la millora d'escoles, edificis públics o fins i tot a les ciutats.
Com a exemple farem una persiana que es controli amb el nivell de llum i un sistema d’il·luminació que es posi en marxa picant de mans.

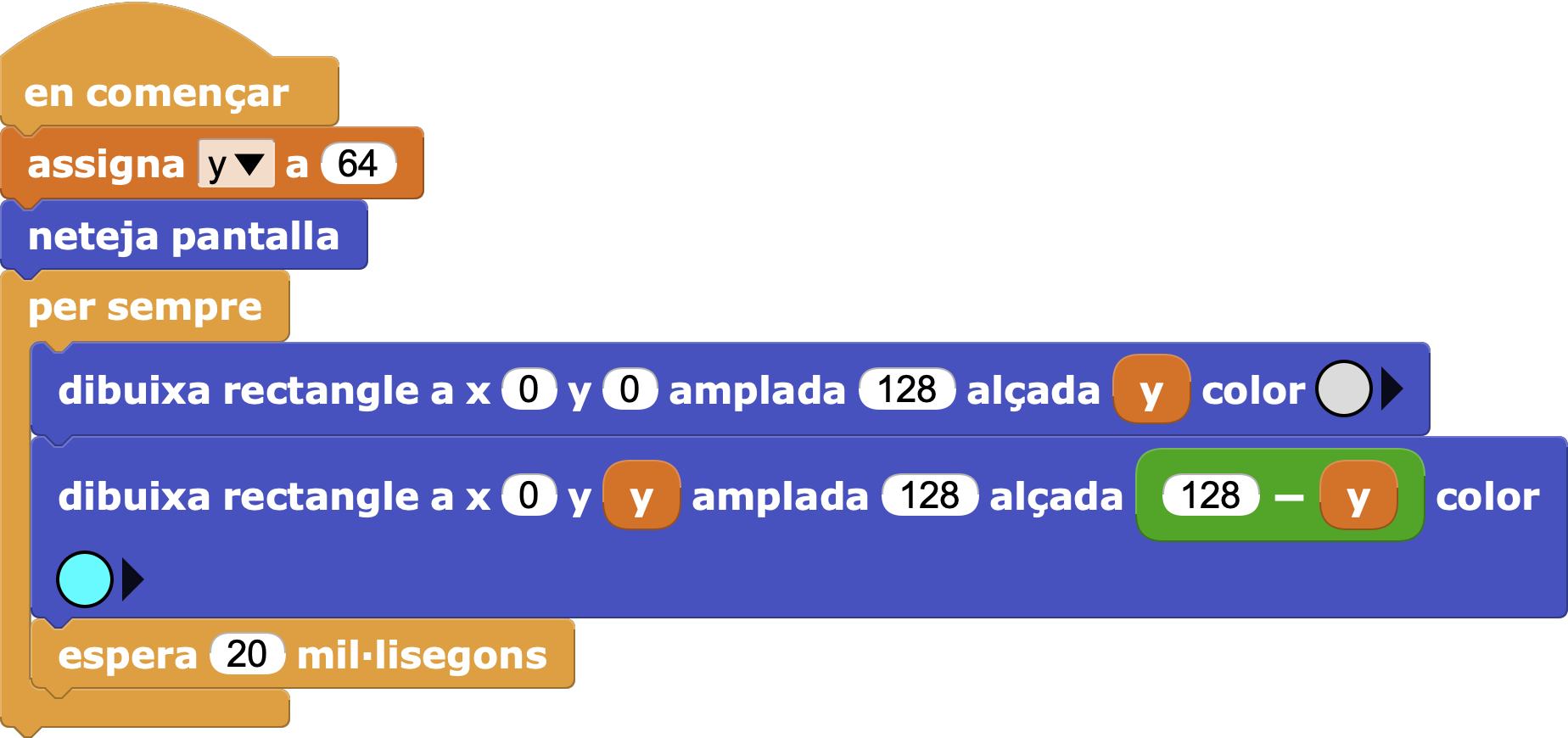
Simulació d'una persiana
Farem servir un senzill dibuix a la pantalla per simular una persiana, l'alçada de la qual variarà segons el valor de la variable y.
En un cas real hauríem de fer servir interruptors de final de cursa que ens indiquen que la persiana ha arribat als límits superior i inferior. Aquí aquest control el farem per programa mitjançant el valor de la variable (0 = superior, 127 = inferior).
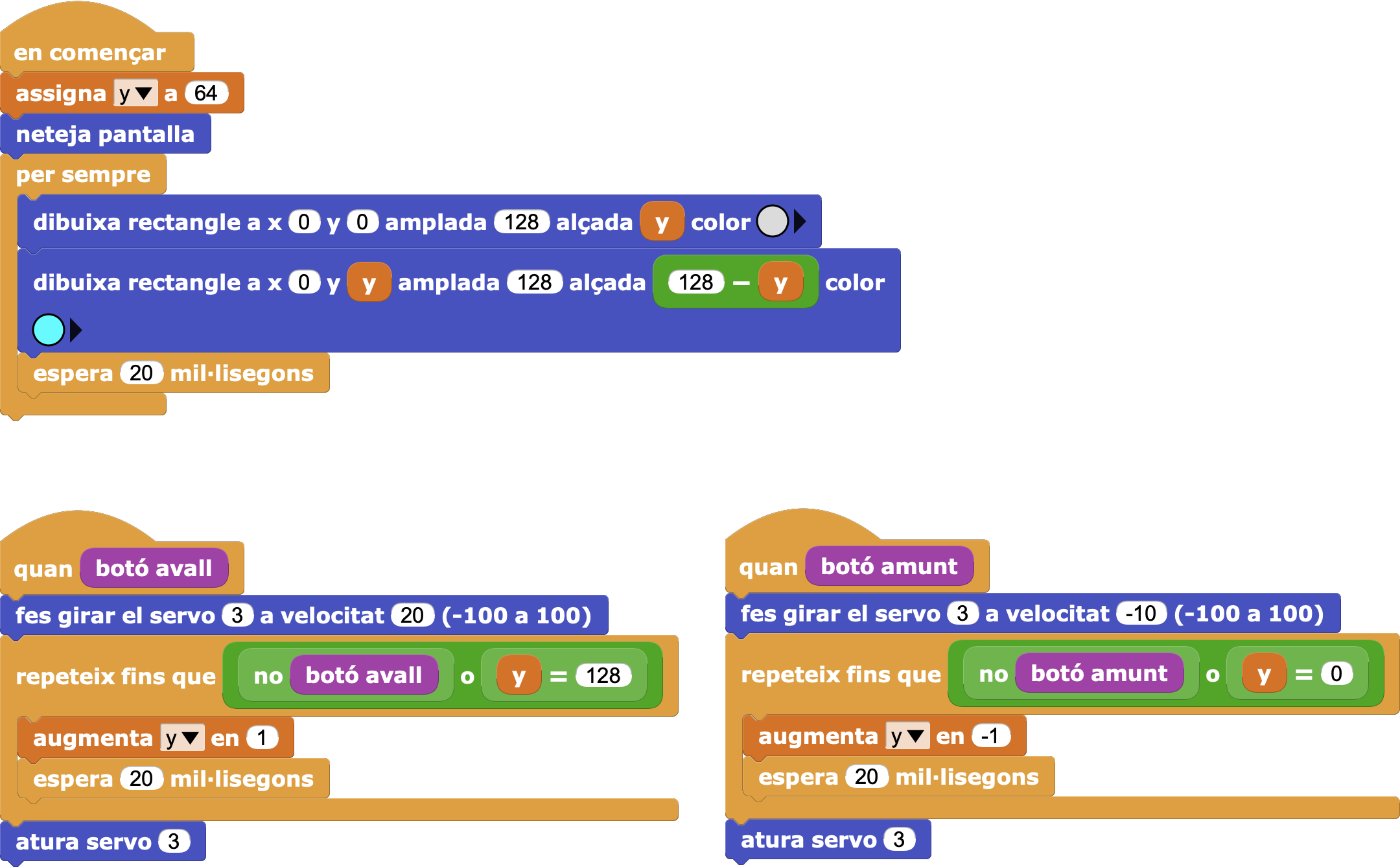
Repte 3: simula una persiana (amb la pantalla i el servomotor) controlada pels botons amunt i avall.
Solució al repte 3
| ⬅️ Activitat anterior | Activitat següent ➡️ |
|---|
© von Citilab Edutec 2019-2025.
This work is licensed under a CC-BY-SA 4.0 license.