
Fantastic Robot with Memory
Lists
To make the robot able to reproduce a few commands in a row, it is necessary to save them beforehand.
We have already used variables to store numbers or texts. In this case we will use one to store a list of commands.
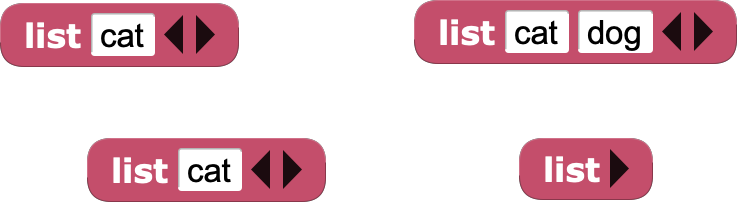
Lists allow us to save a set of data that we can access individually.
The Data category blocks are used to manipulate the lists.

Saving and deleting commands
The block
add _ to list _allows you to add items to a list, on the other hand with the blockdelete item _ of list _you can delete one, the last or all the items from the list .Our robot will have to empty the command list when starting or when we press the X button. This can be done by saving an empty list to the variable, or using the
delete item _ of list _block with the all option selected.


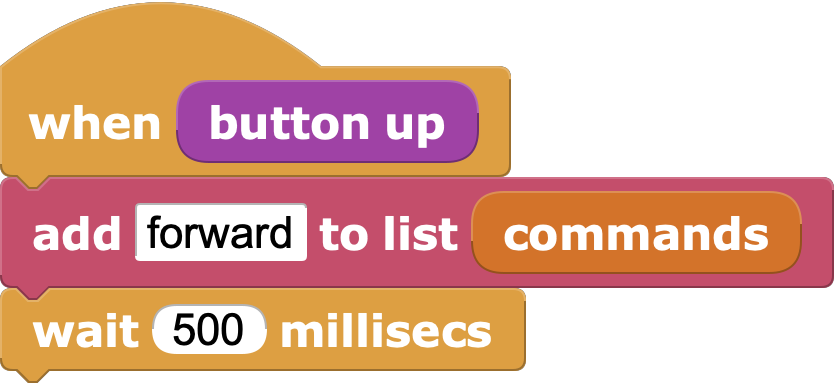
- Each movement button will save an identifier of the corresponding order. The
wait 500 millisecsblock prevents many commands from being added when a button is pressed.
Selecting and executing commands
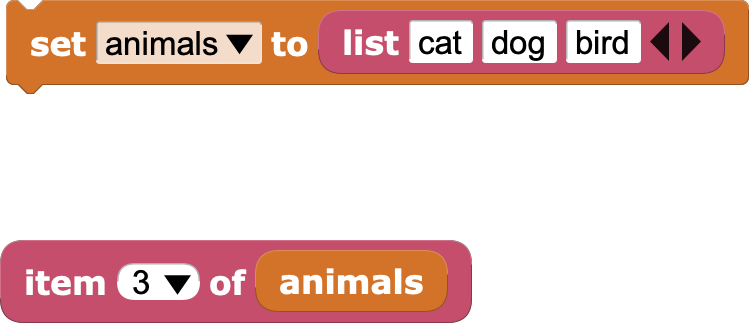
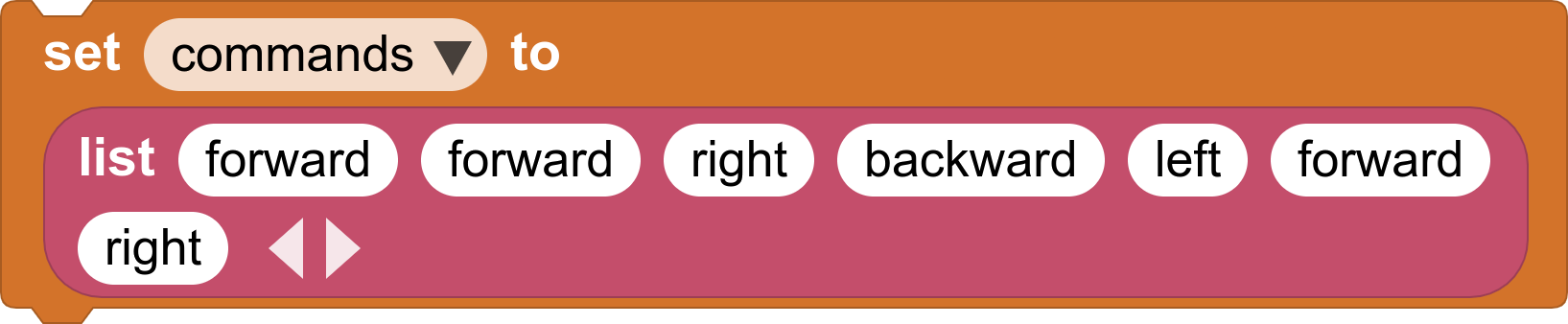
- In the commands list we have the sequence of movements that we want the robot to execute. For example:

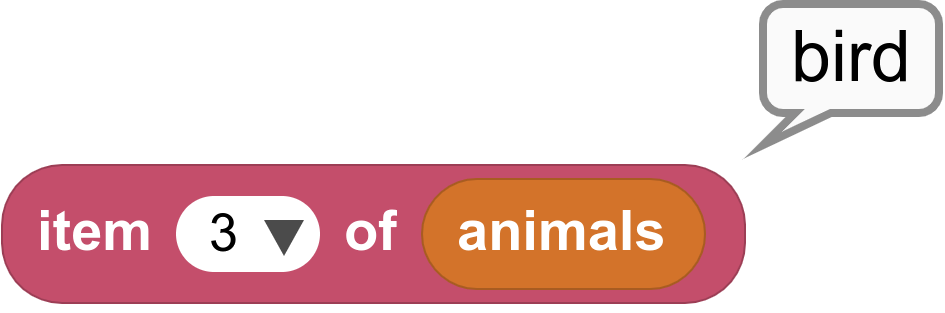
- To access a command, use the block
item _ of _.

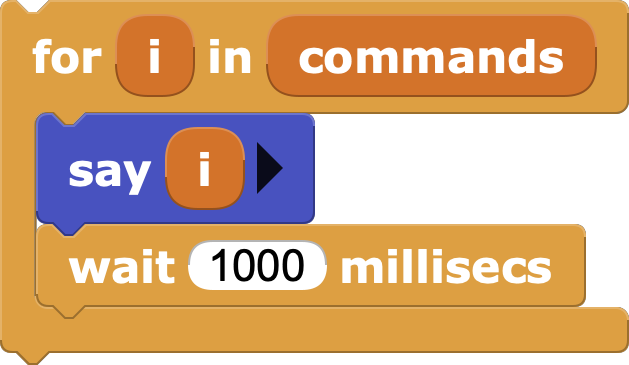
- The control block
for i in _allows iterating through the list. The value of i corresponds to each of the saved items or commands.
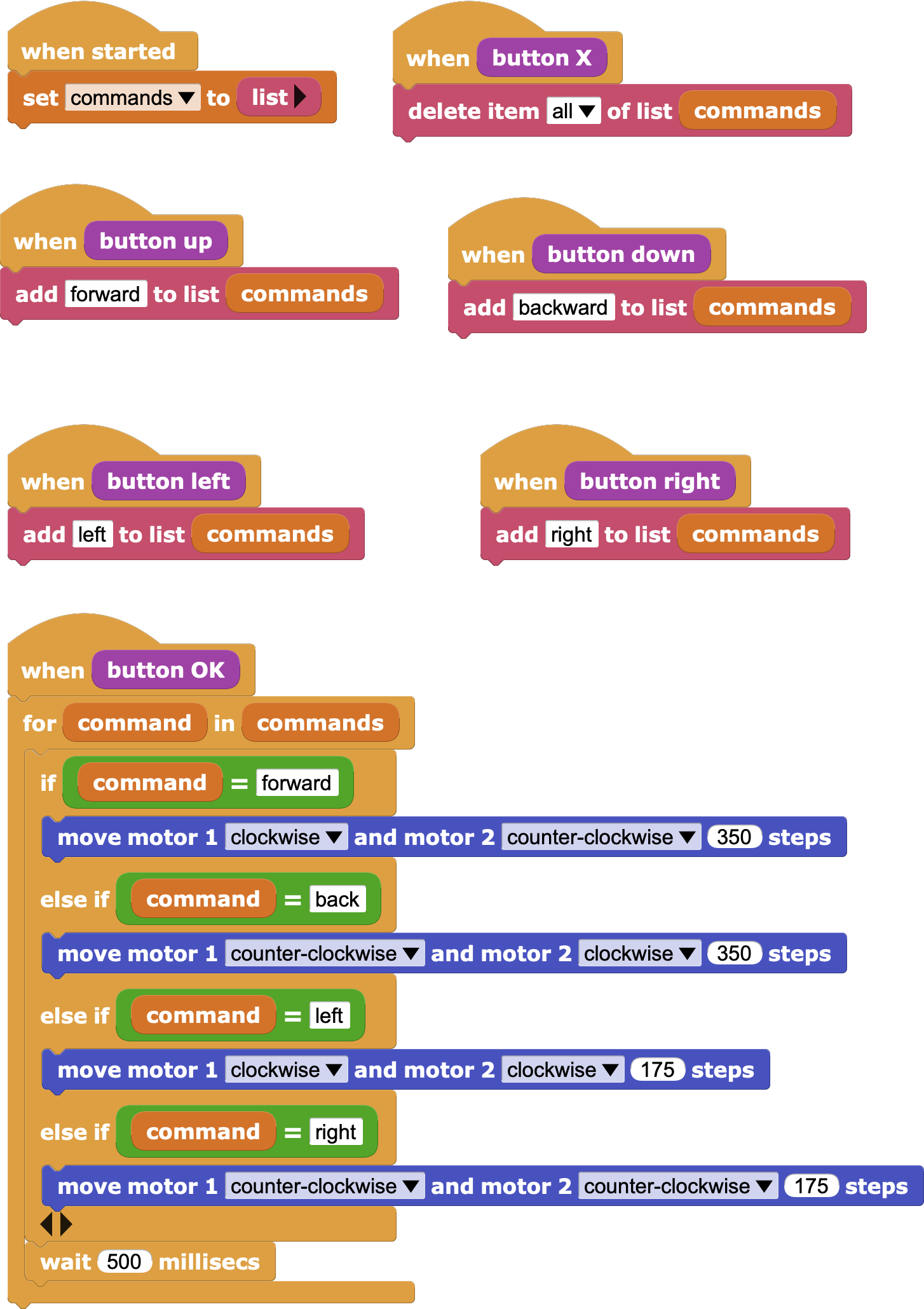
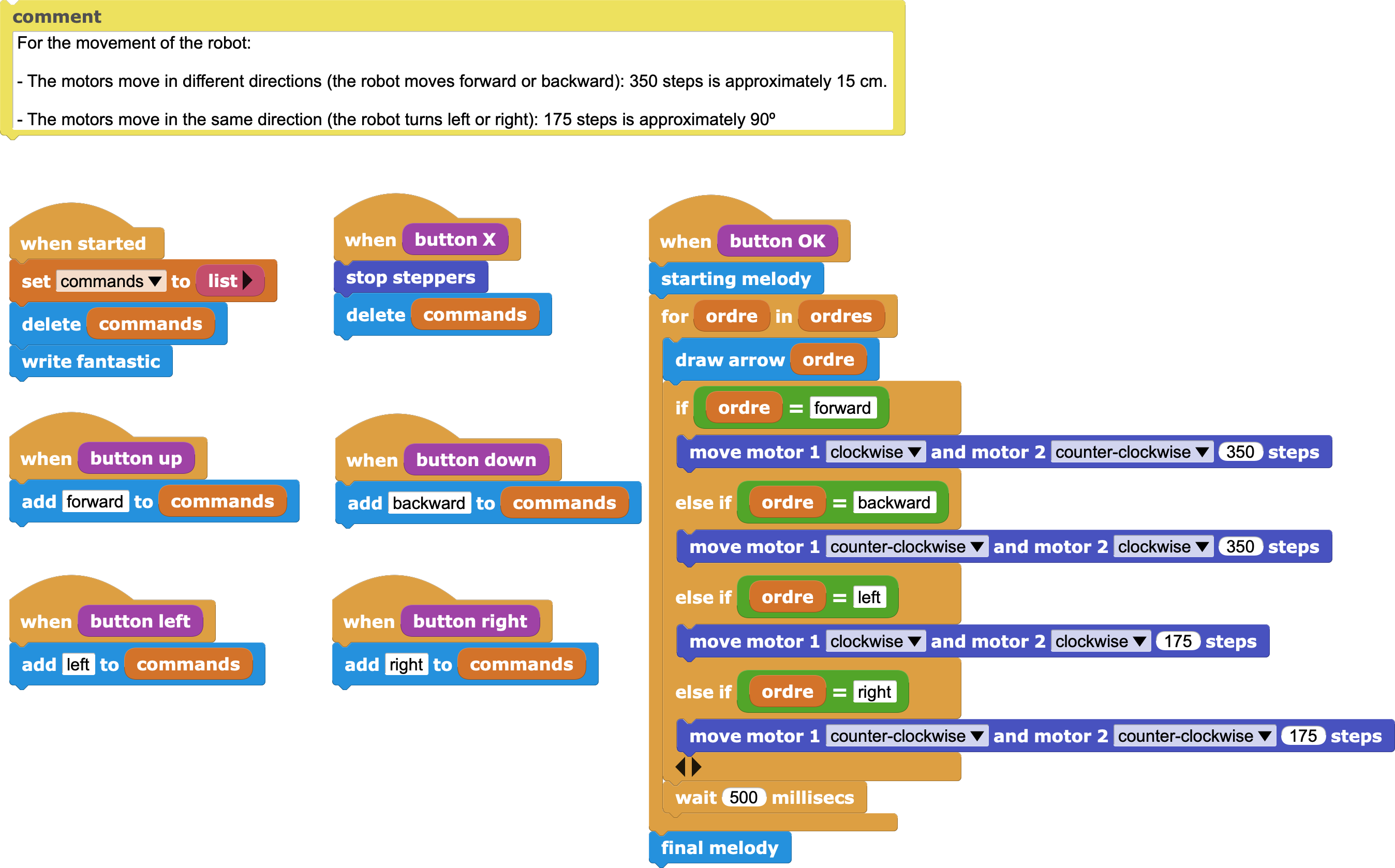
- All that remains is to move the engines based on the commands in the list with the OK button.
Challenge 1: Program the robot with memory.

Solution to challenge 1
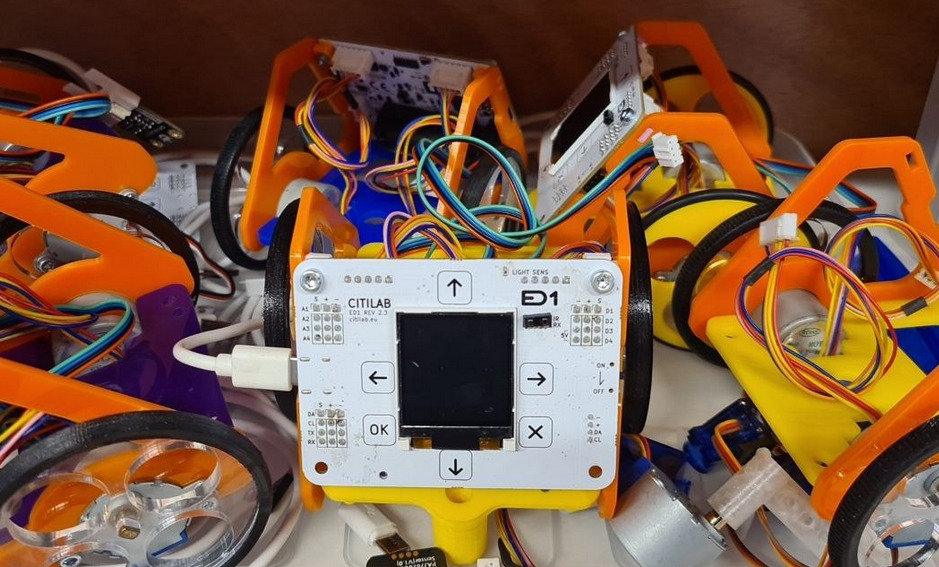
Child ED1 robot
The program used in schools with the Fantastic robot adds sounds and images to the screen to improve interactivity.
You can download it from here.

| ⬅️ Previous activity | Next activity ➡️ |
|---|
© von Citilab Edutec 2019-2025.
This work is licensed under a CC-BY-SA 4.0 license.